
About Dr. Van Sickle
With many years of experience, I’ve advised global companies (Anadarko, IHS Energy, Microsoft, Jeppesen, Maxar, and many more) in geospatial matters. I’ve created and led departments, managed creation of new programs, and developed systems used around the globe. I earned my Ph.D. in geospatial engineering from the University of Colorado, and am an Assistant Teaching Professor at Penn State University and Lecturer at the University of Colorado (Denver).
Seminar Topics
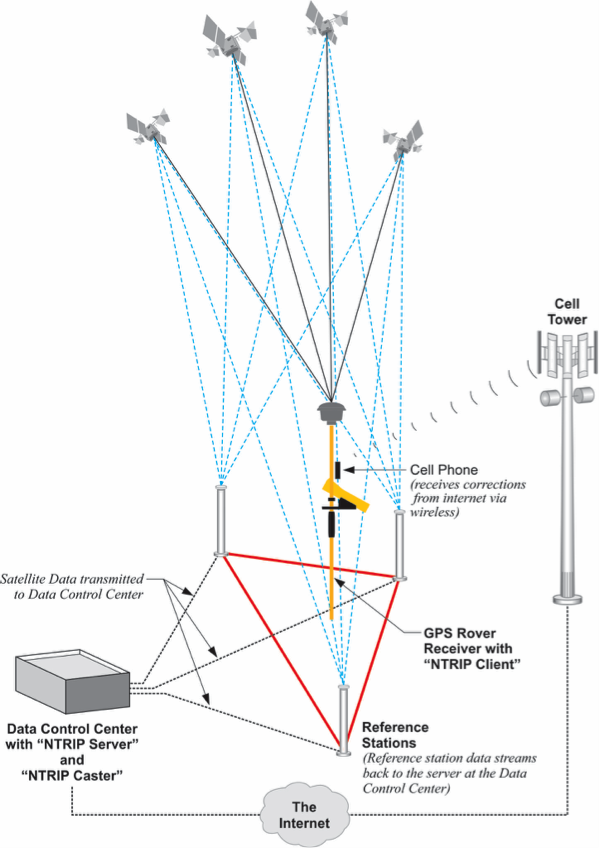
Best Practices for GPS Today
This seminar is about making explaining some elements important to RTN operation and proposing some practical real-time best practices.
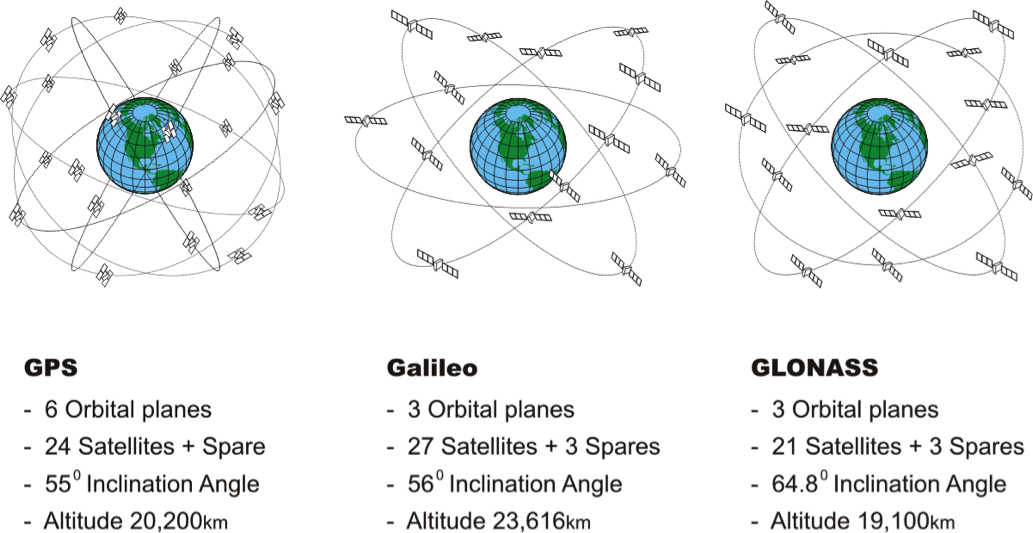
GPS Modernization and GNSS
Within a decade there may be as many as 80 navigational satellites in orbit. What will that mean from the user’s point of view?
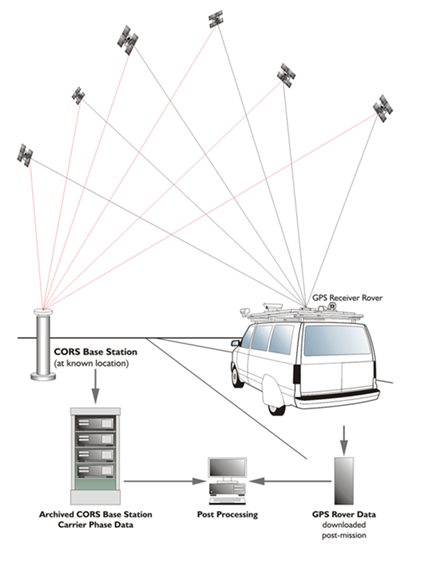
LiDAR, IMU, GNSS and Cameras in Terrestrial Mobile Mapping Systems (MMS)
In a sense the mobile mapping vehicle is a robot that relies on sensors to detect the world. Like your ears, eyes and nose each of its sensors has its specialty. For example, Global Navigation Satellite System (GNSS) receivers contribute good absolute positions in unobstructed environments, not so good in obstructed ones. Inertial Measurement Unit (IMU) positions may have a tendency to wander, but they are unaffected by obstruction. LiDAR is an active sensor whose broadcasted signals are reflected by objects in the vicinity, captured and analyze to produce a cloud of points in the correct relative position with respect to one another. Each has some strengths and some weaknesses which can be balanced if their data are properly combined.
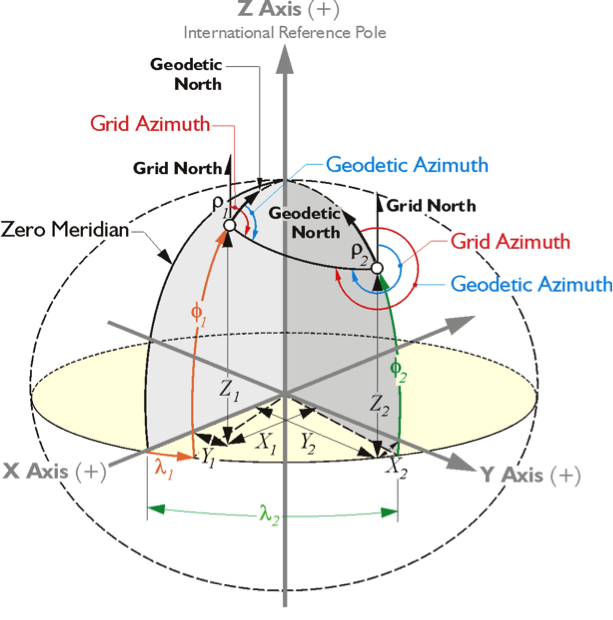
Coordinates and Reference Frames
Coordinates? Press a few buttons on a computer and they are automatically imported, exported, rotated, translated, collated, annotated and served up in any format you choose with no trouble at all. There really is nothing to it. Why have a seminar about coordinates?
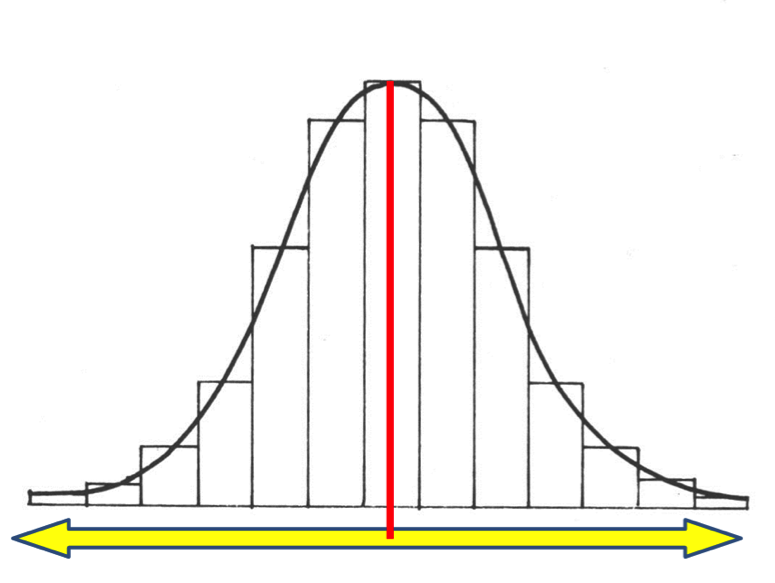
Accuracy, Error Analysis and Statistics
All measurements include error, they must, therefore, be adjusted. This is true no matter how they were gathered.